骁龙自动驾驶仪
官网英文原文地址:http://dev.px4.io/hardware-snapdragon.html
骁龙Snapdragon Flight平台是高端的自动驾驶仪 / 机载计算机, 它的DSP 上 有QuRT 实时操作系统来运行 PX4 ,使用DSPAL API兼容与 POSIX 。 与 Pixhawk 相比它添加了一个摄像头和 WiFi 及其高端的处理能力和不同的 IO 接口。
有关的骁龙平台飞行的更多信息在Snapdragon-Flight-Details

快速摘要
- 片上系统: 骁龙 801
- CPU: Quad-core 2.26 GHz Krait- DSP: Hexagon DSP (QDSP6 V5A) – 801 MHz+256KL2 (运行飞控代码)
- GPU: Qualcomm® Adreno™ 330 GPU
- RAM: 2GB LPDDR3 PoP @931 MHz
- 内存: 32GB eMMC Flash
- 录像: 索尼 IMX135 on Liteon Module 12P1BAD11- 4k@30fps 3840×2160 video capture to SD card with H.264 @ 100Mbits (1080p/60 with parallel FPV), 720p FPV
- 光流: Omnivision OV7251 on Sunny Module MD102A-200
- 640x480 @ 30/60/90 fps - Wifi: Qualcomm® VIVE™ 1-stream 802.11n/ac with MU-MIMO † Integrated digital core
- BT/WiFi: BT 4.0 and 2G/5G WiFi via QCA6234- 802.11n, 2×2 MIMO with 2 uCOAX connectors on-board for connection to external antenna
- GPS: Telit Jupiter SE868 V2 module (使用外部UBLOX模块,建议由PX4代替)
- uCOAX 连接器用于连接到外部 GPS 车载贴片天线- CSR SiRFstarV @ 5Hz via UART
- 加速度计 / 陀螺仪 /磁力计: Invensense公司的MPU-9250 9-轴传感器, 3x3mm QFN, 接在 SPI1
- 气压计: Bosch公司的 BMP280 气压传感器, 接在 I2C3- 电压: 5V直流电用外部2S-6S电池通过APM适配器调节至5V
- 可购买: Intrinsyc商店
接口
- 一个USB 3.0 高速口 (micro-A/B)
- 微型 SD 卡插槽
-万用接头 (PWB/GND/BLSP)
- 电调接口 (2W UART)
- I2C
- 60针高速的Samtec QSH-030-01-L-D-A-K扩展连接器
- 2x BLSP (BAM 低速外设)
- USB
外置引线
WiFi
- WLAN0, WLAN1 (+BT 4.0): U.FL connector: Taoglas 胶粘剂的天线 (DigiKey公司)
连接器
串口的默认对应如下所示︰
| 设备 | 描述 |
|---|---|
/dev/tty-1 |
J15 (next to USB) |
/dev/tty-2 |
J13 (next to power module connector) |
/dev/tty-3 |
J12 (next to J13) |
/dev/tty-4 |
J9 (next to J15) |
为自定义的 UART 到 BAM 映射,创建一个名为"blsp.config"文件和执行命令adb push 把他下到 /usr/share/data/adsp。例如,保留默认的映射,你"blsp.config"应该看起来像:
tty-1 bam-9
tty-2 bam-8
tty-3 bam-6
tty-4 bam-2
J9 / GPS
| Pin | 2-wire UART + I2C | SPI | Comment |
|---|---|---|---|
| 1 | 3.3V | 3.3V | 3.3V |
| 2 | UART2_TX | SPI2_MOSI | Output (3.3V) |
| 3 | UART2_RX | SPI2_MISO | Input (3.3V) |
| 4 | I2C2_SDA | SPI2_CS | (3.3V) |
| 5 | GND | GND | |
| 6 | I2C2_SCL | SPI2_CLK | (3.3V) |
J12 /云台总线
| Pin | 2-wire UART + GPIO | SPI | Comment |
|---|---|---|---|
| 1 | 3.3V | 3.3V | |
| 2 | UART8_TX | SPI8_MOSI | Output (3.3V) |
| 3 | UART8_RX | SPI8_MISO | Input (3.3V) |
| 4 | APQ_GPIO_47 | SPI8_CS | (3.3V) |
| 5 | GND | GND | |
| 6 | APQ_GPIO_48 | SPI8_CLK | (3.3V) |
J13 / 电调总线
| Pin | 2-wire UART + GPIO | SPI | Comment |
|---|---|---|---|
| 1 | 5V | 5V | |
| 2 | UART6_TX | SPI6_MOSI | Output (5V) |
| 3 | UART6_RX | SPI6_MISO | Input (5V) |
| 4 | APQ_GPIO_29 | SPI6_CS | (5V) |
| 5 | GND | GND | |
| 6 | APQ_GPIO_30 | SPI6_CLK | (5V) |
J14 / 电源
| Pin | Signal | Comment |
|---|---|---|
| 1 | 5V DC | Power input |
| 2 | GND | |
| 3 | I2C3_SCL | (5V) |
| 4 | I2C3_SDA | (5V) |
J15 / 无线接收器/传感器
| Pin | 2-wire UART + I2C | SPI | Comment |
|---|---|---|---|
| 1 | 3.3V | 3.3V | |
| 2 | UART9_TX | SPI9_MOSI | Output |
| 3 | UART9_RX | SPI9_MISO | Input |
| 4 | I2C9_SDA | SPI9_CS | |
| 5 | GND | GND | |
| 6 | I2C9_SCL | SPI9_CLK |
外设
UART to Pixracer / Pixfalcon 接线
这个接口是用来利用Pixracer/ Pixfalcon作为I / O接口板。连接到TELEM1在 Pixfalcon和在TELEM2在Pixracer。
| Snapdragon J13 Pin | Signal | Comment | Pixfalcon / Pixracer Pin |
|---|---|---|---|
| 1 | 5V | Power for autopilot | 5V |
| 2 | UART6_TX | Output (5V) TX -> RX | 3 |
| 3 | UART6_RX | Input (5V) RX -> TX | 2 |
| 4 | APQ_GPIO_29 | (5V) | Not connected |
| 5 | GND | 6 | |
| 6 | APQ_GPIO_30 | (5V) | Not connected |
GPS 接线
尽管3DR GPS要求5V输入,采用3.3V输入似乎也能很好地工作。 (内置的调节器MIC5205具有2.5V的最小工作电压)。
| Snapdragon J9 Pin | Signal | Comment | 3DR GPS 6pin/4pin | Pixfalcon GPS pin |
|---|---|---|---|---|
| 1 | 3.3V | (3.3V) | 1 | 4 |
| 2 | UART2_TX | Output (3.3V) | 2/- | 3 |
| 3 | UART2_RX | Input (3.3V) | 3/- | 2 |
| 4 | I2C2_SDA | (3.3V) | -/3 | 5 |
| 5 | GND | 6/- | 1 | |
| 6 | I2C2_SCL | (3.3V) | -/2 | 6 |
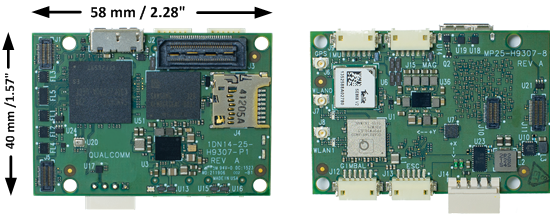
尺寸